Feb01
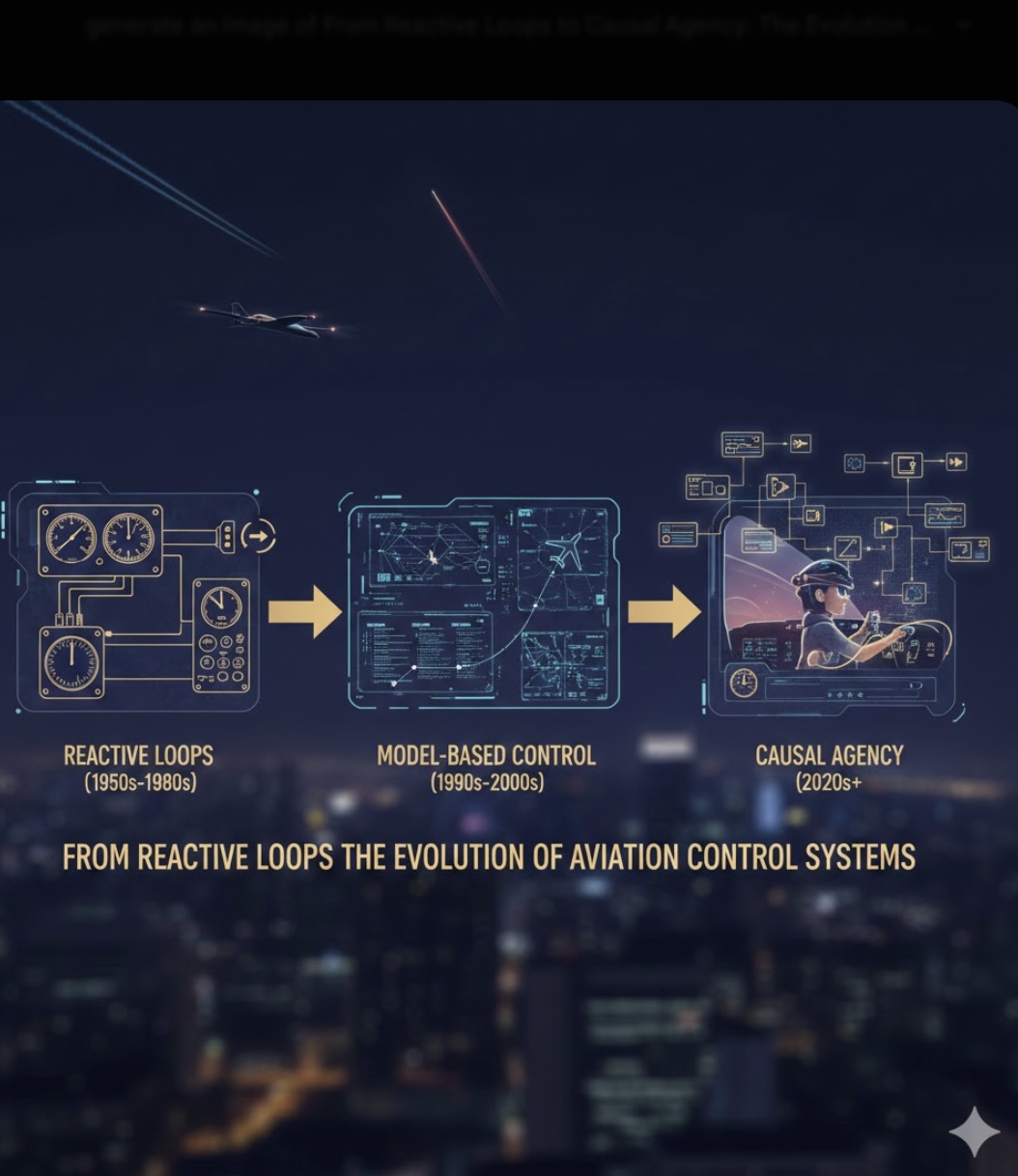
The transition from classical aviation control to the architecture presented in the LEJEPA_VJEPA_AGI_DEMO.ipynb notebook represents a fundamental shift from reactive error-correction to proactive, world-model-based reasoning. While traditional systems focus on correcting immediate errors, this architecture focuses on predicting future physical states and understanding the causal "why" behind flight events.
LEJEPA_VJEPA_AGI_DEMO.ipynb: https://github.com/frank-morales2020/MLxDL/blob/main/LEJEPA_VJEPA_AGI_DEMO.ipynb
| Feature | Traditional PID / Autopilot | Causal Planning (JEPA-based) |
| Core Logic | Reactive: Calculates a "tracking error" and applies gains to minimize it. | Proactive: Simulates future states in a latent "world model" to select the best action sequence. |
| Knowledge | Implicit: Operates on mathematical derivatives without "knowing" flight concepts. | Explicit: Uses a "modular hybrid cognitive stack" to ground physics in semantic concepts. |
| Data Handling | Point-in-Time: Processes immediate sensor input (altitude, speed) to adjust surfaces. | Spatio-Temporal: Analyzes video sequences and historical trajectories to understand dynamics. |
| Failure Mode | Disengagement: Often defaults to "disengage and alert" when sensor data is conflicting. | Graceful Reasoning: Uses an LLM to provide a causal assessment of anomalies and suggest fixes. |
1. From Correlation to Causality
Traditional autopilots are constrained by the frequency-domain tuning of their PID loops, which respond primarily to events, such as a drop in altitude. The Morales framework uses the DeepSeek-reasoner to interpret why an event occurs—for example, identifying engine power loss during a final approach—bridging the gap between raw telemetry and symbolic causal inference.
2. Eliminating Control "Hacks" with SIGReg
Traditional robust control requires complex mathematical development and manual tuning. The implementation of SIGReg (Sketched Isotropic Gaussian Regularization) simplifies this process by enforcing stable $N(0,I)$ latent distributions without the need for momentum teachers or stop-gradients. This mechanism effectively prevents "representational collapse," a common failure mode in earlier AI-driven controllers.
3. Model Predictive Path Planning (MPPI)
Unlike a PID controller that acts on a single setpoint, the Predictive Latent Dynamics Model (PLDM) allows for "System II" cognitive processing. This involves running a "simulation-in-the-head" to project 4D aircraft states into the future. By evaluating multiple "what-if" scenarios before the actual control surfaces move, the agent mimics the high-level planning a human pilot performs during emergency procedures.
The notebook addresses representational hurdles by adopting the November 2025 LeJEPA framework. SIGReg enforces stable statistics on latent representations, eliminating the complex heuristics used in earlier self-supervised models. Furthermore, by leveraging a frozen V-JEPA backbone for feature extraction and DeepSeek for semantic assessment, the architecture provides a natural-language causal analysis of flight phases.
The shift toward AI-driven engineering agency marks an era where flight systems possess a "Physical DNA" of their environment. By combining the visual perception of V-JEPA with the stabilized physical forecasting of LeJEPA, this architecture moves aviation closer to truly autonomous agents that understand the causal physics governing safety-critical domains.
Keywords: Predictive Analytics, Generative AI, Agentic AI
 How to succeed with AI adoption?
How to succeed with AI adoption? Friday’s Change Reflection Quote – Saeculum Leadership – Leadership Stewardship Demands Transparency
Friday’s Change Reflection Quote – Saeculum Leadership – Leadership Stewardship Demands Transparency The Corix Partners Friday Reading List - July 24, 2026
The Corix Partners Friday Reading List - July 24, 2026 The borders have moved, and leadership has not yet caught up
The borders have moved, and leadership has not yet caught up No More Hold Music: How AI is Fixing the UK’s Customer Service Crisis
No More Hold Music: How AI is Fixing the UK’s Customer Service Crisis